- FIR/тепловизор (LWIR 8–14 мкм) — лучший «универсал» для сельских/трассовых условий и обнаружения людей/животных в полной темноте и встречной блёсткости; устойчив к фарам и контровому свету.

- Активный NIR (≈ 850/940 нм) — высокий контраст и детализация дорожной разметки и объектов при собственной ИК-подсветке; слабее в тумане/снеге из-за рассеяния, «подсветка» может демаскироваться на 850 нм.

- SWIR (≈ 1.0–1.7 мкм) — лучше «видит» через аэрозоли (туман/дым/мгла) по сравнению с видимым/NIR; растущая технология с перспективами массового CMOS-производства.

- Gated-imaging (импульсная подсветка + «затвор» кадра) — эффективно подавляет обратное рассеяние в тумане/дожде, даёт «срезы дальности»; пока нишевая и дорогая.

- Максимальную эффективность сегодня часто даёт сенсорный фьюжн (телекамера видимого диапазона + FIR/SWIR + радар/лидар) и интеграция с AEB/ADAS.



- Оглавление
- 1) Почему ночью сложнее
- 2) Типы систем ночного видения: принципы и диапазоны
- 2.1. Активный NIR (Near-IR, ~ 0.75–1.0/1.4 мкм)
- 2.2. Пассивный FIR/тепловизор (LWIR, ~ 8–14 мкм)
- 2.3. SWIR (Short-Wave IR, ~ 1.0–1.7 мкм)
- 2.4. Gated-imaging («импульсная» ИК-съёмка с временным затвором)
- 3) Как мы сравниваем «эффективность»: метрики и методика
- 4) Сравнительная таблица технологий (сводка)
- 5) Разбор по сценариям (балльная матрица 1–5)
- 6) Интеграция с ADAS: почему это важно
- 7) Стоимость, установка, калибровка и эксплуатация
- 7.1. Ориентиры стоимости
- 7.2. Монтаж и калибровка
- 7.3. Эксплуатация и уход
- 8) Рекомендации по выбору под ваши условия
- Если вы чаще ездите по трассам/лесам ночью
- Если у вас частые туманы/морось/морская мгла
- Городская эксплуатация с фонарями/неоном
- Смешанные условия, максимум безопасности
- 9) Чек-лист покупки и настройки
- 10) FAQ
- 11) Глоссарий
- Итоговые рекомендации по эффективности
- Сравнительная мини-таблица «плюсы/минусы»
Оглавление
- Почему ночное вождение сложнее
- Типы систем ночного видения: принципы и диапазоны
- Как мы сравниваем «эффективность»: метрики и методика
- Сравнительная таблица технологий
- Разбор по сценариям: тёмная трасса, город, туман, дождь, снег, блёсткость фар
- Интеграция с ADAS: подсветка пешеходов/животных, AEB, HUD
- Стоимость, установка, калибровка и эксплуатация
- Рекомендации по выбору под климат/маршруты
- Чек-лист покупки и настройки
- FAQ
- Глоссарий ключевых терминов
1) Почему ночью сложнее
Ночью падает контраст, сокращается периферическое зрение и скорость распознавания сцен. Добавьте к этому встречные фары, мокрый асфальт, туман, снег, «чёрных» животных на загородной дороге — и риск пропустить опасность растёт. Классические фары и даже «матрицы» улучшают видимость, но они не «видят тепла» и не подавляют обратное рассеяние. Здесь и помогают системы ночного видения (Night Vision, NV), которые выводят на приборку/HUD «добавочную картинку» и/или подают предупреждения.
2) Типы систем ночного видения: принципы и диапазоны
2.1. Активный NIR (Near-IR, ~ 0.75–1.0/1.4 мкм)

Камера чувствительна к ближнему ИК и «видит» сцену, подсвеченную собственным ИК-источником (LED/лазер 850 или 940 нм). Плюсы: высокая детализация дорожной разметки/текстур, невысокая цена сенсора, хорошая интеграция с распознаванием. Минусы: рассеяние в тумане/снеге/дожде (блик-«засвет»), возможное слабое красноватое свечение излучателя на 850 нм; 940 нм «менее заметен», но обычно даёт чуть хуже чувствительность. (cecas.clemson.edu)
Примечание про 850 нм vs 940 нм. 850 нм обычно даёт лучший сигнал/детализацию, но светодиоды могут быть слегка видимы (красное «тлеющее» пятно); 940 нм — незаметнее для глаза, но часто с меньшей дальностью/детальностью. Это справедливо для многих ИК-камер и фонарей. (us.nightfoxstore.com)
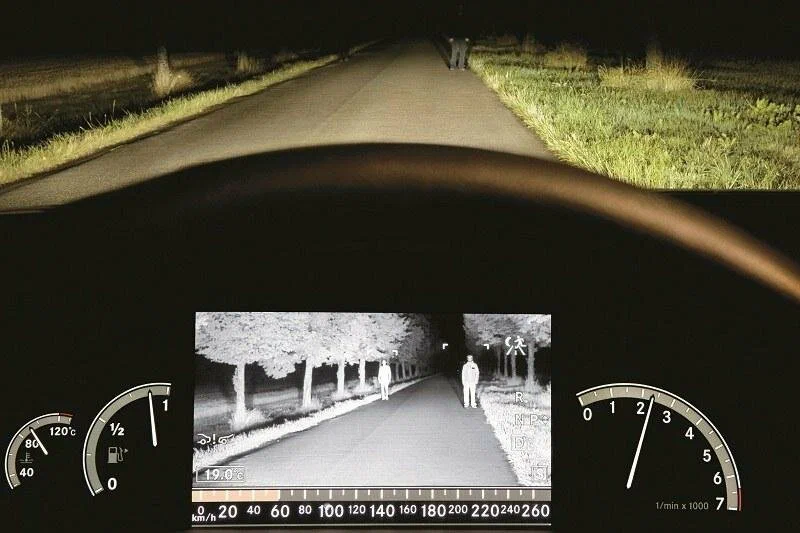
2.2. Пассивный FIR/тепловизор (LWIR, ~ 8–14 мкм)
Камера не подсвечивает сцену — она детектирует тепловое излучение объектов (люди, животные, двигатели, выхлоп, тёплая земля). Сильные стороны: полная темнота не проблема, встречные фары и контровой свет почти не мешают, животные/пешеходы «выделяются» теплом. Слабые места: меньше «текста» разметки и мелких деталей, зависимость от температурного контраста (в сильный мороз/под дождём он меняется). Типичный представитель — FLIR PathFindIR II (320×240, FoV ~ 24°; заявляемая «видимость» существенно дальше, чем фары). (cecas.clemson.edu)
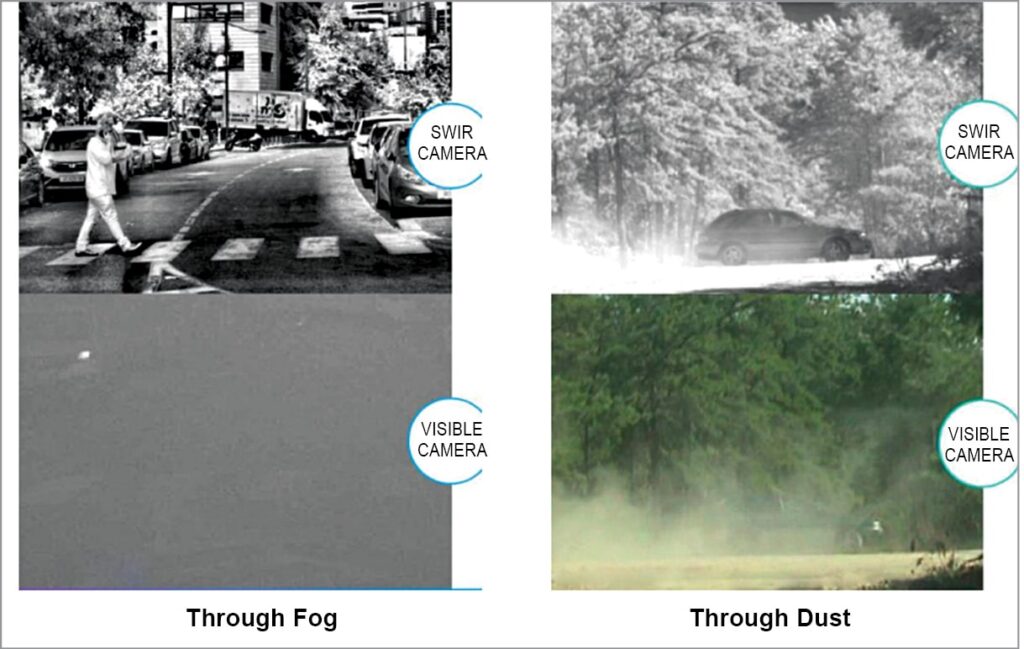
2.3. SWIR (Short-Wave IR, ~ 1.0–1.7 мкм)
SWIR лучше проходит через аэрозоли (туман/дым/мгла) по сравнению с видимым/NIR за счёт иного механизма рассеяния; современные решения переходят на CMOS-совместимые датчики с перспективой снижения цены и массового внедрения. Часто используется «safe-eye» подсветка (безопасная для глаза). Пока дороже NIR, но дешевле/компактнее некоторых MWIR-вариантов, и быстро развивается. (TriEye)
2.4. Gated-imaging («импульсная» ИК-съёмка с временным затвором)

Система импульсно подсвечивает сцену и открывает «затвор» камеры с заданной задержкой, «срезая» обратное рассеяние от близких капель/тумана. Итог — существенно меньше «молочного» вуаля, можно получать срезы дальности (range slices) и/или «стекать» в дальнюю картинку. Технология сложнее и дороже, но в тумане/дожде часто показывает класс. (opg.optica.org)
Диапазоны в целом: активные NIR/SWIR работают с собственной подсветкой в ~ 0.8–1.7 мкм; пассивный FIR/LWIR ловит собственное тепло объектов в ~ 8–14 мкм. (cecas.clemson.edu)
3) Как мы сравниваем «эффективность»: метрики и методика
Метрики:
- Дальность обнаружения (Detection) — с какого расстояния система стабильно «замечает» объект (пешеход, животное, авто без света).
- Дальность распознавания/идентификации (Recognition/Identification) — когда водитель/алгоритм уверенно понимает «кто это» и контур.
- Робастность к погоде — туман (адвективный/радиационный), дождь, снег, морось, аэрозоль, слой воды на асфальте.
- Устойчивость к блёсткости/контровому свету — встречные фары, отражения/сигналы, мокрый асфальт.
- Ложные тревоги — внятность/стабильность подсветки опасностей (пешеход/животное), отсутствие «фантомов».
- Угловое покрытие/поле зрения — видимость обочин, съездов, «предупреждение о лосях».
- Латентность и UX — задержка картинки, «ночной» HUD/кокпит, контрастность, простота чтения.
- Интеграция с ADAS/AEB — подсветка/рамка на объекте, предупреждение/торможение.
- TCO — цена, монтаж, юстировка, чистка оптики, долговечность, энергопотребление.
- Юридические аспекты — безопасность подсветки (лазеры/LED), ЭМС.
Методика полевого сравнения (если будете тестировать сами):
- Маршрут: город (фонари/неон), трасса (полная темнота), лесная просека, туманная низина, мокрый асфальт после дождя.
- Объекты: манекен пешехода, «чёрная» фигура, макет животного, велосипед без светоотражателей, «лежачий» предмет.
- Погодные окна: сухо/дождь/снег/морось/туман (2 вида), блёсткость.
- Замеры: дистанция первого уверенного обнаружения и уверенной идентификации (в метрах), время реакции (с), доля кадров с «засветом/вуалью» (%), ложные тревоги (шт./час).


4) Сравнительная таблица технологий (сводка)
Оценки «Баллы 1–5» — усреднённый экспертный взгляд по типичным системам 2024–2025 гг. Для конкретных моделей смотрите паспортные данные и результаты тестов.
| Технология | Принцип | Диапазон | Дальность обнаружения (типичная)* | Туман/морось | Дождь/снег | Блёсткость фар | Животные/пешеходы | Поле зрения | Интеграция с ADAS | Стоимость/сложность | Итог по эффективности |
|---|---|---|---|---|---|---|---|---|---|---|---|
| FIR / LWIR (тепловизор) | Пассивное «видит тепло» | 8–14 мкм | Высокая на трассе; PathFindIR II заявляет «значительно дальше фар» (сотни м)** | 4/5 (не «молоко», но сильный туман снижает контраст) | 4/5 | 5/5 | 5/5 (теплоконтраст) | 3–4/5 (часто узкий FoV ~ 24°) | 4/5 | 3–4/5 | Сильный «трассовик» |
| Активный NIR | Камера + ИК-подсветка | ~ 0.85/0.94 мкм | Средне-высокая (зависит от мощности/оптики) | 2–3/5 (рассеяние) | 3/5 | 3/5 | 3–4/5 | 4–5/5 | 4–5/5 | 3/5 (доступен, прост) | Баланс цена/возможности |
| SWIR | Камера (часто с подсветкой) | ~ 1.0–1.7 мкм | Высокая (особенно сквозь аэрозоли) | 4–5/5 | 4/5 | 4/5 | 4/5 | 3–4/5 | 4–5/5 | 3/5 (цена падает) | Лучше в тумане/мгле |
| Gated-imaging | Импульс + «временной затвор» | ~ 0.8–1.0+ мкм | Очень высокая (настроечные «срезы дальности») | 5/5 | 5/5 | 5/5 | 4/5 | 3–4/5 | 4–5/5 | 2–3/5 (сложно/дорого) | Топ в непогоде |
* Конкретные числа зависят от оптики, сенсора, алгоритмов, FoV и условий.
** По публичным материалам PathFindIR II: FoV ~ 24°, 320×240; производители указывают «видимость» дальше света фар, с типовыми цифрами порядка > 2000 ft для сцены (это условная дальность наблюдения в идеальных условиях, не «дальность распознавания» конкретной цели). Проверяйте спецификации своей версии. (oem.flir.com)
5) Разбор по сценариям (балльная матрица 1–5)
| Сценарий | FIR/LWIR | Активный NIR | SWIR | Gated-imaging |
|---|---|---|---|---|
| Тёмная загородная трасса, «чёрный» лось/собака | 5 | 3 | 4 | 4 |
| Город с фонарями/неоном | 4 | 5 | 4 | 4 |
| Встречные фары/контровой свет | 5 | 3 | 4 | 5 |
| Мокрый асфальт после дождя (блики) | 5 | 3 | 4 | 5 |
| Сильный туман/морось | 3–4 | 2 | 4–5 | 5 |
| Снег средней интенсивности | 4 | 3 | 4 | 5 |
| Узкие повороты/обочины | 3–4 (зависит от FoV) | 4–5 | 4 | 4 |
| Дистанция «раннего предупреждения» | 5 | 3–4 | 4 | 5 |
| Стабильность детекции пешеходов/животных | 5 | 4 | 4 | 4 |
| Цена/простота внедрения | 3–4 | 5 | 3 | 2–3 |
Почему так:
- FIR/LWIR не ослепляется фарами и отлично «подсвечивает» тёплые цели в темноте. (cecas.clemson.edu)
- NIR даёт «камерный» вид с разметкой, но страдает от рассеяния в тумане и блёсткости. (photonics.com)
- SWIR выигрывает в аэрозолях (туман/дым/мгла) по сравнению с видимым/NIR. (TriEye)
- Gated отрезает обратное рассеяние импульсом+затвором. (opg.optica.org)
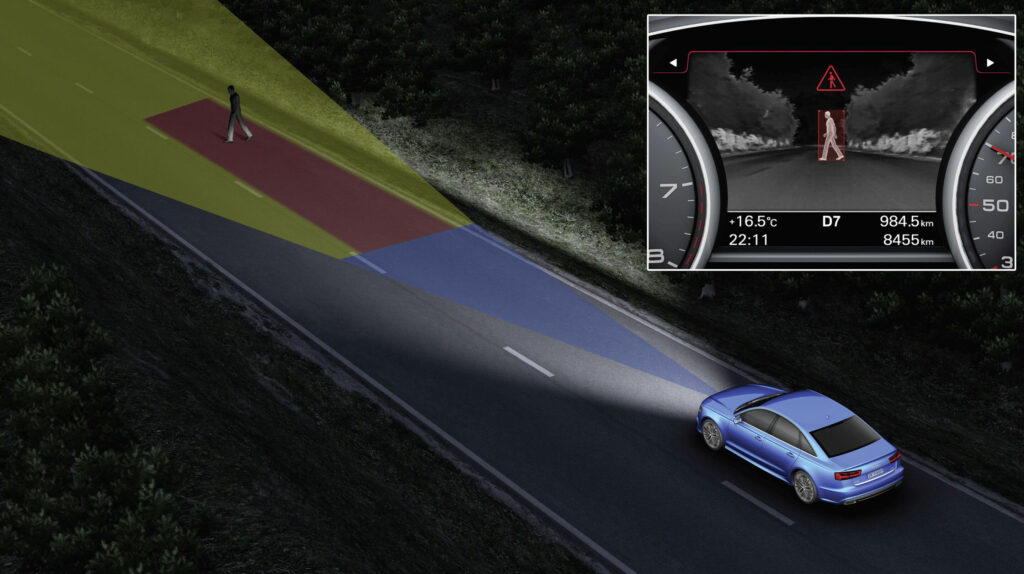
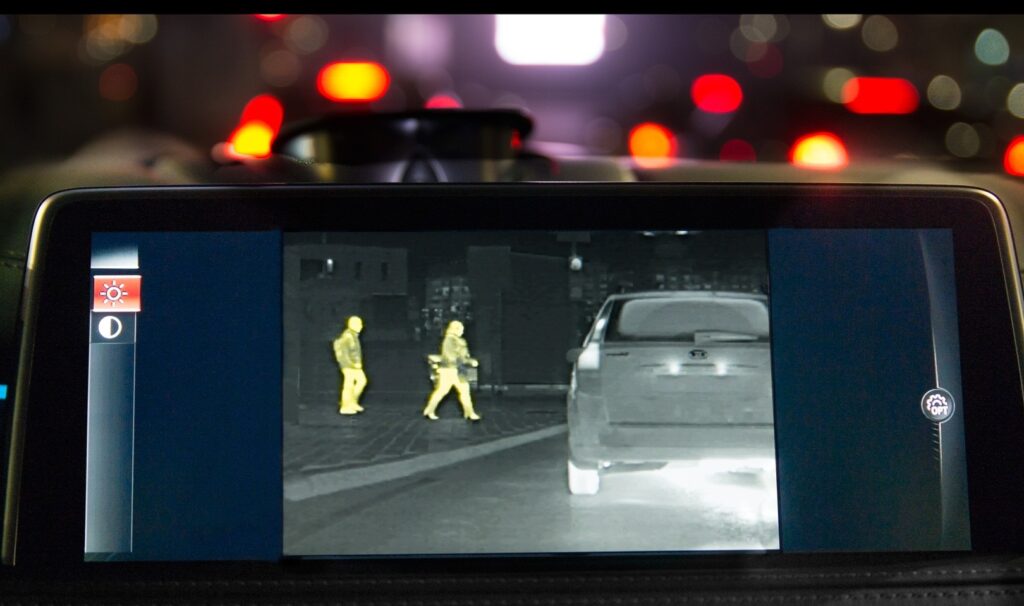
6) Интеграция с ADAS: почему это важно
Сама по себе «ночная картинка» полезна, но истинная эффективность раскрывается в связке с ADAS:
- Подсветка цели (рамка/контур пешехода/животного) — уменьшает когнитивную нагрузку, повышает скорость реакции.
- Аудио/визуальные предупреждения — без ложной назойливости.
- Связь с AEB/ACC/ESC — автоматическое торможение/снижение скорости при «критической» цели в зоне риска.
- HUD/приборка — «где смотреть» в тёмное время: чем ближе к линии взгляда, тем лучше UX.
- Сенсорный фьюжн — алгоритмы объединяют FIR/SWIR + RGB + радар/лидар, что повышает надёжность в сложной погоде и снижает ложные тревоги.
7) Стоимость, установка, калибровка и эксплуатация
7.1. Ориентиры стоимости
- Aftermarket FIR/LWIR (напр., FLIR PathFindIR II) — ориентировочно от ~ $2 000 за комплект (без сложной интеграции). Реальные цены зависят от конфигурации/дистрибьютора. (tequipment.net)
- Активный NIR — относительно недорогие камеры/подсветка; интеграция с головным устройством может стоить больше самой камеры.
- SWIR — пока дороже NIR, но стоимость падает с появлением массового CMOS-производства; в премиальном сегменте или спецтехнике уже встречается. (Электронный Дизайн)
- Gated-imaging — самая высокая сложность и цена: специализированные датчики, синхронизация импульсов, оптика. (brightwayvision.com)
7.2. Монтаж и калибровка
- Выбор места установки: тепловизор не любит «тепловой шлейф» от радиатора — избегайте горячих зон и прямого обдува.
- FoV и угол: на трассу часто берут уже угол (≈ 24–30°) ради дальности; в городе — шире для обочин/переходов. (Например, у PathFindIR II FoV около 24°.) (oem.flir.com)
- Свето- и влаго-защита: IP-рейтинг корпуса, обогрев стекла, «самоочистка». У PathFindIR II встречается IP69-класс исполнения. (tequipment.net)
- Кабель-менеджмент/EMC: экранирование, чтобы не ловить помехи от зажигания/генератора.
- Юстировка: ось камеры = оси авто; проверьте параллакс/наклон, сделайте тест-проезды.
7.3. Эксплуатация и уход
- Чистка защитного окна (особенно зимой и на трассе).
- Обновления прошивки/алгоритмов (если доступны).
- Мониторьте ложные срабатывания и корректируйте пороги предупреждений.
- Юридика/безопасность подсветки: используйте безопасные (Class 1) источники; SWIR-подсветки позиционируются как «safe-eye». Всегда сверяйтесь с документацией поставщика. (TriEye)
8) Рекомендации по выбору под ваши условия
Если вы чаще ездите по трассам/лесам ночью
Берите FIR/LWIR тепловизор: он «видит» животных/пешеходов далеко и не слепнет от фар/бликов. По возможности — интеграция с предупреждениями и HUD.
Если у вас частые туманы/морось/морская мгла
Смотрите на SWIR или gated-imaging: они лучше справляются с обратным рассеянием и «молочной» вуалью. Gated — лидер в непогоде, но дороже. (opg.optica.org)
Городская эксплуатация с фонарями/неоном
Активный NIR даёт контрастную «камерную» картинку, удобно распознаёт дорожные детали и пешеходов на переходах. Учтите ограничения в тумане/снеге.
Смешанные условия, максимум безопасности
Комбинация: FIR + (RGB или NIR/SWIR) + радар/лидар + AEB. Даже если одна технология «проседает», фьюжн «подстрахует» и удержит стабильность детекции.
9) Чек-лист покупки и настройки
- Цель: трасса/город/туман/снег — что важнее?
- FoV: нужен узкий (дальше) или широкий (обочины)?
- Интеграция: картинка на штатный экран/кластер/HUD, предупреждения, AEB.
- Юридика/безопасность: класс лазерной/LED-подсветки, соответствие нормам.
- Крепёж/обогрев/стекло: защита IP, очистка объектива, антивибрация.
- Алгоритмы: подсветка целей, фильтрация ложных тревог, режим «туман/дождь».
- Сервис: обновления ПО, гарантия, поддержка.
- Тест-проезд ночью: проверьте дальность обнаружения «своих» сценариев.
- Порог предупреждений: настройте «зрелость» тревоги, чтобы не «звенело» по пустякам.
- Док-фото: снимите «правильную» юстировку (горизонт, уклон), храните как эталон.
10) FAQ
1. Что даёт ночное видение сверх хороших фар?
Фары подсвечивают видимый свет и страдают от бликов/тумана; NV добавляет альтернативный «канал зрения» (тепло/ИК), меньше слепится и «видит» теплоконтрастные цели далеко за пределами светового пятна.
2. FIR против NIR — что лучше?
Нет «абсолютных победителей». FIR сильнее в полной темноте, контровом свете и при обнаружении животных/людей; NIR даёт «камерную» картинку с разметкой и дешевле/проще интегрируется.
3. Правда, что 850 нм «видно глазом»?
Немного: 850 нм ближе к видимому, некоторые источники дают слабое красное «тление». 940 нм незаметнее, но часто менее чувствительно для камер. (us.nightfoxstore.com)
4. Поможет ли NV в тумане?
Да, но по-разному. Активный NIR страдает от рассеяния. SWIR и особенно gated-imaging лучше «режут» туман; FIR иногда помогает, но при плотном аэрозоле контраст падает. (opg.optica.org)
5. Насколько далеко «видит» тепловизор?
Зависит от FoV/оптики/алгоритмов и того, что считать «видит». Производители указывают условные дистанции наблюдения сцены (сотни метров), но распознавание конкретной цели обычно ближе. Проверяйте паспорт конкретной модели (напр., PathFindIR II — 320×240, FoV ~ 24°, заявлена «видимость дальше фар»). (oem.flir.com)
6. А если встречный водитель «увидит» мою подсветку?
Для 850 нм возможно лёгкое видимое «тление». 940 нм почти незаметна, но дальность/детализация могут упасть. Учитывайте стандарты безопасности излучения. (us.nightfoxstore.com)
7. Что такое SWIR и стоит ли оно своих денег?
SWIR работает в 1.0–1.7 мкм, лучше через аэрозоли, активно развивается за счёт CMOS-совместимых сенсоров — цена снижается, функциональность растёт. Для туманных регионов — перспективная инвестиция. (Электронный Дизайн)
8. Gated-imaging — это «лидар»?
Нет. Это камера с импульсной подсветкой и временным «затвором», которая отбрасывает ближнее рассеяние и может собирать «срезы дальности». Иногда даёт и оценку глубины, но принцип иной. (opg.optica.org)
9. Легально ли ставить такие системы?
Обычно да, но подсветка должна соответствовать классам безопасности для глаза и нормам ЭМС. Уточняйте в документации и местных регламентах; производители SWIR подчёркивают «safe-eye». (TriEye)
10. Можно ли «прикрутить» к штатному дисплею?
Часто — да: через видеовход/адаптеры/интерфейсы. Важны совместимость, разрешение и режим «ночного» UI.
11. Нужно ли обслуживать?
Да: чистка окна/линзы, проверка крепежа/юстировки, обновления ПО, тест «на дальность» раз в сезон.
12. NV заменяет AEB?
Нет. Это дополнительный сенсорный канал. Лучший результат — в связке с AEB/ADAS.
11) Глоссарий
- NIR — ближний ИК (~ 0.75–1.0/1.4 мкм), обычно активная подсветка 850/940 нм.
- SWIR — коротковолновый ИК (~ 1.0–1.7 мкм), лучше через аэрозоли; возможна безопасная подсветка. (TriEye)
- FIR/LWIR — дальний/длинноволновый ИК (~ 8–14 мкм), пассивное «тепло». (cecas.clemson.edu)
- Gated-imaging — импульсная подсветка + временной «затвор» кадра, подавление обратного рассеяния. (opg.optica.org)
- Backscatter (обратное рассеяние) — «молочная вуаль» от тумана/дождя при активной подсветке. (opg.optica.org)
Итоговые рекомендации по эффективности
- Трасса/дикая фауна/полная темнота → FIR/LWIR как основной канал предупреждения.
- Туманные регионы/морось/дымка → SWIR или gated-imaging (лучший анти-туман эффект).
- Город/фонари/разметка/камерная картинка → Активный NIR.
- Максимум безопасности → фьюжн (FIR/SWIR + RGB + радар/лидар) и интеграция с AEB/HUD.
Сравнительная мини-таблица «плюсы/минусы»
| Технология | Плюсы | Минусы |
|---|---|---|
| FIR/LWIR | Сильная дальность обнаружения в темноте; не слепнет от фар; отлично «ловит» людей/животных | Меньше «деталей» дорожной сцены; иногда узкий FoV; зависит от теплоконтраста |
| Активный NIR | Чёткая «камерная» картинка и разметка; доступность и простота интеграции | Рассеяние в тумане/снеге; 850 нм иногда заметен глазу |
| SWIR | Лучше через туман/мглу; развивается CMOS-платформа | Цена выше NIR (но падает); требует подсветки/интеграции |
| Gated-imaging | Лидер в непогоде; «срезы дальности», подавление «молока» | Самая высокая сложность/стоимость; нишевость |