- Почему вопрос «кто виноват» стал ключевым для робомобилей
- Базовые лимиты выплат по ОСАГО (РФ) в 2025 году
- Кто виноват в ДТП с робомобилем в России: текущая логика
- 1) Владелец ВАТС — первичный носитель гражданско-правовой ответственности
- 2) Эксперименты и локальные режимы
- 3) Роль удалённого оператора
- Как доказывают, кто управлял авто: данные DSSAD/EDR
- Кейс-логика: 5 типовых сценариев ДТП и «кто платит»
- Как это устроено в других юрисдикциях (коротко)
- Сравнительная таблица: кто и как отвечает за ДТП с робомобилем
- Практика урегулирования: как готовиться владельцу/оператору робопарка
- Чек-лист для участника ДТП с робомобилем
- Часто задаваемые вопросы (FAQ)
- Практические рекомендации для владельцев и интеграторов робомобилей
- Источники и документы
- Приложение: краткий шаблон внутренних регламентов для робопарка (пример)
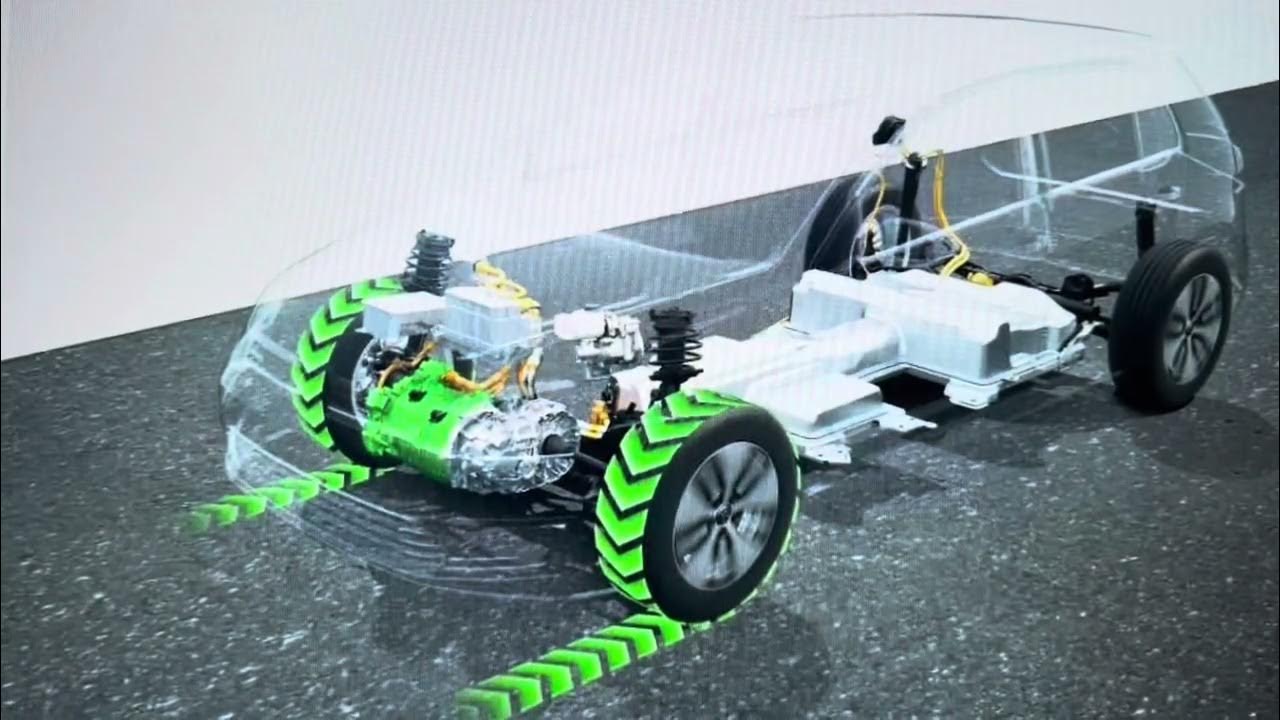
Почему вопрос «кто виноват» стал ключевым для робомобилей
Появление высокоавтоматизированных транспортных средств (ВАТС) и роботакси меняет классическую логику автострахования. Если раньше в ДТП всегда был «водитель-виновник», то в беспилотном режиме за рулём может не быть человека — управление осуществляет система, а над ней стоят разработчик, производитель, владелец парка и, нередко, удалённый оператор. Поэтому для ОСАГО и аналогичных режимов ответственности встают три практических вопроса:
- кто первично платит пострадавшим;
- кого в итоге признают ответственным;
- как технически доказать, кто управлял в момент аварии — человек или автомат.


Ниже — структурированный разбор по РФ с опорой на действующие лимиты ОСАГО и эксперименты с беспилотниками, а также краткие сравнения с Великобританией и ЕС, где уже приняты «цифровые» нормы о продуктовой ответственности и автономном вождении. Для расследований всё большее значение приобретают «чёрные ящики» для АВ (EDR/DSSAD), которые фиксируют, был ли включён автопилот, — эти требования формируются на уровне ЕЭК ООН (UNECE) для систем уровня 3 и выше. (КонсультантПлюс)
Базовые лимиты выплат по ОСАГО (РФ) в 2025 году
ОСАГО остаётся базовым механизмом защиты пострадавших, в том числе если ДТП произошло при включённой автоматизации:
- до 500 000 ₽ — за вред жизни и здоровью на каждого потерпевшего;
- до 400 000 ₽ — за имущественный ущерб (каждому потерпевшему). (КонсультантПлюс)


С июля 2025 года повышены лимиты европротокола при разногласиях (без полиции при фотофиксации): с 100 000 ₽ до 200 000 ₽. Это важно для мелких столкновений, в том числе с участием робомобилей на городских улицах. (Банки.ру)
Важно: ОСАГО выплачивает пострадавшим быстро и «по умолчанию», а затем, при необходимости, страховщик может реализовать регресс к реальному причинителю вреда (например, к производителю при доказанном дефекте системы) — это ключевой мост между страхованием и сложной экспертизой «кто виноват» в робо-ДТП. (Общий принцип следует из конструкции ОСАГО и ГК РФ; конкретные регрессы зависят от установленных причин связи/вины.)
Кто виноват в ДТП с робомобилем в России: текущая логика
1) Владелец ВАТС — первичный носитель гражданско-правовой ответственности

Российский регуляторный курс (обсуждавшийся в 2024 году) исходит из того, что за вред, причинённый ВАТС, основную гражданско-правовую ответственность несёт владелец транспортного средства. Переложить её можно, если доказано, что вред вызван конструктивным недостатком системы управления/ВАТС. Это приближает робомобили к обычным автомобилям: первым платит ОСАГО владельца, а дальше возможны регрессы/суброгация к производителю/разработчику при дефекте. (CNews.ru)
2) Эксперименты и локальные режимы
В России применяются экспериментальные правовые режимы (ЭПР) для высокоавтоматизированного транспорта (Москва, логистические коридоры и др.). Документы ЭПР обычно содержат специальные разделы о страховании и требования к участникам, включая порядок контроля, мониторинга и условия допуска. В частности, программы ЭПР прямо предусматривают блок о необходимости (или отсутствии необходимости) дополнительного страхования ответственности поверх базового ОСАГО. (Документы ЦНТД)
3) Роль удалённого оператора

В пилотах часто предусмотрен удалённый оператор либо «режим готовности» человека. Если оператор принял управление (или должен был вмешаться, но не сделал этого) — его организация может стать адресатом регресса. Это фактически аналог «водителя», хотя юридическая конструкция пока формируется в рамках ЭПР и договоров между заказчиком, оператором и производителем. (Ссылочные положения об операторах и контроле движения приводятся в описаниях ЭПР и отраслевых разъяснениях.) (Минтранс России)
Как доказывают, кто управлял авто: данные DSSAD/EDR

Для систем уровня 3 (и выше) международный регулятор UNECE R157 (ALKS) требует DSSAD — регистратора, который записывает, активирован ли режим автоматизированного вождения и когда произошла передача контроля. Эти данные становятся ключевыми при расследовании: если в момент столкновения ответственность несла система (автопилот активен, корректно работал в своих границах), страховщик/владелец могут предъявить регресс к производителю/поставщику ПО при доказательстве дефекта. Если система требовала немедленного вмешательства, но водитель/оператор проигнорировал запрос — повышаются риски ответственности владельца/оператора. (UNECE)
Кейс-логика: 5 типовых сценариев ДТП и «кто платит»
- Лобовое столкновение на робомаршруте при активном автопилоте.
- Первично платит ОСАГО владельца робомобиля (пострадавшим — в пределах лимитов).
- Дальше возможен регресс к производителю/интегратору при доказанном дефекте сенсоров/алгоритмов (например, ложное распознавание). (CNews.ru)
- Соприкосновение на парковке при манёвре под присмотром удалённого оператора.
- ОСАГО — как обычно.
- Если установлено, что оператор нарушил процедуры (задержка реакции, управление вне регламента), регресс вероятен к операторской компании. (Локальные правила ЭПР и договоры SLA.) (Документы ЦНТД)
- Сбой после OTA-обновления ПО.

- ОСАГО закрывает вред потерпевшим.
- ЕС уже расширил продуктовую ответственность на ПО/обновления (новая PLD), что усиливает рычаги регресса к поставщику ПО при дефекте/вскрытой уязвимости. В РФ подход движется в сторону аналогичной логики через общие нормы о дефектной продукции и договорную ответственность. (Reuters)
- Столкновение с нарушителем, въехавшим на красный.
- Как и в обычной практике, ключ — причинная связь: если в ДТП виноват другой участник, ОСАГО робомобиля покрывает лишь вред «третьим лицам» от действий своего ТС (если таковой есть), а общая вина вменяется нарушителю ПДД. DSSAD помогает показать, что система действовала в пределах ТЗ.
- ДТП при вынужденном ручном вождении (fallback).
- Если система корректно запросила передать контроль, а водитель принял его и ошибся — это «человеческая вина»; первично ОСАГО владельца, без регресса к производителю.
- Если запрос на переход был некорректным (ложный fallback) — возникает пространство для регресса.


Как это устроено в других юрисдикциях (коротко)
- Великобритания. В 2024 году принят Automated Vehicles Act — одна из самых продвинутых рамок. Суть: пострадавшие получают компенсацию по системе автострахования, а ответственность за соответствие системы берёт на себя ASDE (организация, отвечающая за самоуправление). Это упрощает путь для потерпевших и системно переносит риски на тех, кто выводит технологию на дороги. (Addleshaw Goddard)
- Европейский союз. В декабре 2024 г. принята новая Директива о продуктовой ответственности (PLD): она прямо охватывает ПО и ИИ, включая дефекты, возникшие после продажи (например, из-за обновлений/машинного обучения). Странам-членам дан срок до конца 2026 г. на имплементацию. Это создаёт мощную базу для регрессов к разработчикам/операторам цифровых компонентов. (Reuters)
- Международные техтребования. UNECE R157 (ALKS) обязывает производителей внедрять Driver Availability Recognition и DSSAD, что делает «режим управления» проверяемым по логам. (UNECE)
Сравнительная таблица: кто и как отвечает за ДТП с робомобилем
| Юрисдикция | Кто платит потерпевшему «здесь-и-сейчас» | Кого признают ответственным в конечном итоге | Роль страховщика | Особые требования/заметки |
|---|---|---|---|---|
| Россия (2025) | ОСАГО владельца ТС в пределах 500 000 ₽ (здоровье) и 400 000 ₽ (имущество) | Базово — владелец ВАТС; возможен регресс к производителю/интегратору при доказанном дефекте | Выплата по ОСАГО с последующим регрессом при выявлении причинителя вреда | ЭПР для ВАТС; в программах — блоки о страховании/контроле; DSSAD/EDR используются как доказательства режима управления |
| Великобритания | По схеме автострахования; для потерпевшего процесс упрощён | Введён институт ASDE (ответственный субъект за самоуправление) | Страховщик платит, затем разбирается с ASDE/поставщиками | Automated Vehicles Act 2024 — системная рамка для self-driving |
| ЕС | Национальные режимы ОСАГО/аналогов | Расширена продуктовая ответственность на ПО/ИИ и обновления | Возможны регрессы к цифровым поставщикам (ПО/обновления) | Новая PLD (принята 09.12.2024), имплементация до 12.2026 |
| Техтребования (UNECE) | — | — | — | R157 (ALKS): Driver Availability + DSSAD («чёрный ящик») |
Практика урегулирования: как готовиться владельцу/оператору робопарка
- Полисы: помимо ОСАГО, проверьте требования ЭПР/контрактов: может потребоваться расширенная гражданская ответственность и/или профстрахование оператора. (Документы ЦНТД)
- Данные: обеспечьте надёжное хранение и доступность логов DSSAD/EDR; от этого зависит скорость признания режима управления и перспективы регресса. (UNECE)
- OTA-процессы: документируйте тестирование и откаты обновлений; в ЕС такие кейсы подпадают под PLD, в РФ — под общие нормы о качестве/безопасности продукции/услуг. (Reuters)
- SLA оператора: пропишите пороги вмешательства, каналы связи, тренировку и реакцию на аварийные сигналы, чтобы минимизировать риски оператора.
- Согласие с городом/ЭПР: следите за валидностью разрешений, картографических границ, геозон и обновлений «цифровых карт безопасной эксплуатации».


Чек-лист для участника ДТП с робомобилем

- Безопасность: включите аварийку, установите знак, эвакуируйте людей.
- Фиксация: сфотографируйте место, следы, видимые сенсоры, таблички, VIN; при возможности отметьте на фото индикаторы режима (дисплей, сигнал «Автопилот активен»).
- Данные системы: при наличии — сохраните дамп DSSAD/EDR (по процедуре производителя/оператора). (UNECE)
- Оформление: используйте европротокол (при отсутствии пострадавших и наличии разногласий — лимит 200 000 ₽ при фотофиксации). (Банки.ру)
- Уведомления: сообщите страховщику, оператору ВАТС и производителю (если так предписано договором/ЭПР).
- Медицинская часть: фиксируйте обращения и расходы — это важно для получения выплат по здоровью (до 500 000 ₽ на каждого пострадавшего). (КонсультантПлюс)


Часто задаваемые вопросы (FAQ)
Кто платит первым, если в аварию попал роботакси?
Пострадавшие получают возмещение от страховщика по ОСАГО владельца автомобиля в пределах лимитов. Затем страховщик может предъявить регресс к производителю/разработчику/оператору, если докажет дефект системы или нарушение регламентов. (КонсультантПлюс)
Если автопилот был включён, всегда ли виноват производитель?
Нет. Нужно доказать дефект (конструктивный/алгоритмический) и причинную связь. Если система работала в пределах ТЗ, а вмешательство человека было необходимо и не выполнено — ответственность может лечь на владельца/оператора. Тут критичны данные DSSAD/EDR. (UNECE)
Повышались ли лимиты ОСАГО в 2025 году?
Базовые лимиты (500 000/400 000 ₽) сохраняются; по европротоколу при разногласиях лимит повышён до 200 000 ₽ при фотофиксации (с июля 2025 г.). (Банки.ру)
А как в Европе и Великобритании?
В Великобритании Automated Vehicles Act 2024 централизует ответственность через автострахование и институт ASDE; в ЕС новая PLD расширяет продуктовую ответственность на ПО/ИИ и обновления, облегчая иски к цифровым поставщикам. (Addleshaw Goddard)
Нужно ли специальное страхование для участия в пилоте/ЭПР?
Как правило, программы ЭПР содержат раздел о страховании (может потребоваться дополнительное покрытие сверх ОСАГО). Условия прописываются в самой программе ЭПР и соглашениях участников. (Документы ЦНТД)
Что делать, если вред превысил лимиты ОСАГО?
Остаток взыскивают с причинителя вреда (лично или через регресс к производителю/оператору при доказанном дефекте/вине). Поэтому крупные парки робомобилей обычно держат расширенные покрытия ГПО и страховые «надстройки».
Можно ли оформить европротокол с робомобилем?
Да, если выполняются общие условия (нет пострадавших, согласие/или фотофиксация при разногласиях и т. п.). Для робомобиля важно сохранить телеметрию; это ускорит урегулирование. (Банки.ру)
Практические рекомендации для владельцев и интеграторов робомобилей
- Актирование и хранение логов: формализуйте процедуры извлечения DSSAD/EDR, чтобы исключить споры о «режиме управления». (UNECE)
- Страховой архитектурный дизайн: держите пакет — ОСАГО + расширенная ответственность + киберриски/ошибки ПО (в ЕС PLD прямо подталкивает к этому). (Reuters)
- Контракты: пропишите матрицу ответственности: владелец парка ↔ оператор ↔ производитель/поставщик ПО ↔ поставщик карт/связи.
- Процедуры OTA: внедрите «двухключевой» выпуск, журналирование и возможность безопасного отката.
- Обучение персонала: аварийные сценарии, сбор доказательств, работа с европротоколом, коммуникация со страховщиком.
- В России «первичная забота о потерпевших» остаётся за ОСАГО владельца ТС — в том числе для робомобилей. Лимиты прежние: 500 000 ₽ (здоровье) и 400 000 ₽ (имущество). (КонсультантПлюс)
- «Кто виноват» решается через связку телеметрии (DSSAD/EDR) и экспертиз: если доказан дефект системы, вероятен регресс к производителю/поставщику ПО; если нарушены регламенты оператора/владельца — ответственность остаётся у них. (UNECE)
- Мир движется к модели, где пострадавший получает выплату быстро, а далее страховщики/компании разбираются между собой (UK AV Act, новая PLD в ЕС). Это ускоряет урегулирование и распределяет риски ближе к тем, кто выводит технологии на дорогу. (Addleshaw Goddard)


Источники и документы
- 40-ФЗ «Об ОСАГО»: страховые суммы и порядок выплат (ред. 31.07.2025). (КонсультантПлюс)
- Обзор лимитов и практики выплат по ОСАГО (2025). (Autonews)
- UNECE R157 (ALKS): обязательность DSSAD и Driver Availability Recognition. (UNECE)
- Российские дискуссии и подход: владелец ВАТС как основной носитель ответственности + регресс к производителю при дефекте. (CNews.ru)
- Automated Vehicles Act 2024 (Великобритания): рамка ответственности и роль ASDE. (Addleshaw Goddard)
- EU Product Liability Directive (принята 09.12.2024): расширение ответственности на ПО/ИИ и обновления, имплементация до 12.2026. (Reuters)
- Элементы ЭПР для ВАТС и транспортных пилотов (страхование, контроль, оператор). (Документы ЦНТД)
Приложение: краткий шаблон внутренних регламентов для робопарка (пример)
- Политика данных DSSAD/EDR: ответственность за выгрузку, хранение, права доступа; срок хранения не менее X месяцев; формат хеширования.
- Процедуры OTA: план релизов, стендовая валидация, «canary-деплой», rollback ≤ N минут, журналирование.
- Матрица SLA оператора: пороги вмешательства, метрики задержки, эскалация, учёт инцидентов.
- Инцидент-респонс при ДТП: чек-лист фиксации (фото/видео, телеметрия, свидетели), нотификация страховщика и регуляторов по ЭПР.
- Юридический блок: порядок взаимодействия со страховщиком при регрессе/суброгации, хранение доказательств, взаимодействие с производителем.
Отказ от ответственности: материал носит информационный характер и не заменяет юридическую консультацию. Для реальных кейсов учитывайте условия договора ОСАГО, программы ЭПР и локальные нормативные акты вашего региона.